
Funktsionaalse struktuuri vaatenurgast on vaakumgeneraatori täitmine peamiselt elektromagnetiline juhtventiil, mis juhib vaakumgeneraatorit, et realiseerida alarõhu tekitamine ja peatamine, et saavutada tooriku ligitõmbamise ja vabastamise funktsioon.
Sellest tulenevalt sisaldab süsteem üldiselt järgmisi komponente: 1. Suruõhuallikas;2. Filter;3. Lüliti solenoidklapp;4. Vaakumajam;5. Otsa iminapa, turvapadi jne (tüüpiline struktuur on näidatud alloleval joonisel).
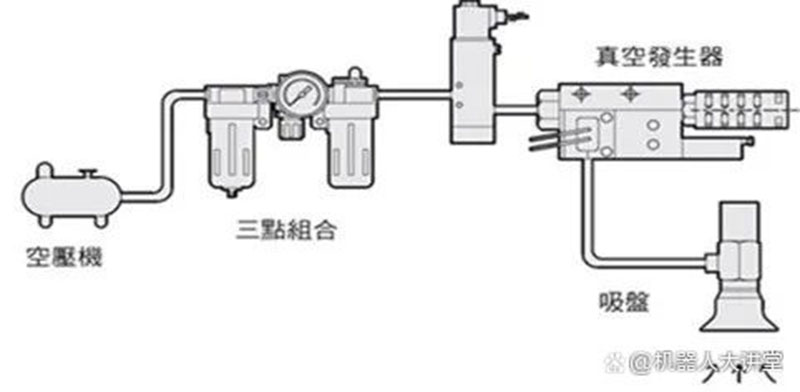
Lisaks lisavad mõned tootjad tööstusautomaatika nõuete kohaselt vaakum-adsorptsiooniprotsessi jälgimiseks viimastel aastatel süsteemi tavaliselt pneumaatilisi juhtimiskomponente, nagu voolumõõturid, rõhu tuvastamise lülitid ja läheduslülitid.
Kuna aga enamikku komponente muudab integraator vastavalt kliendi vajadustele ja kohapealsetele töötingimustele, on kogu süsteemi keerukus sageli kõrge.
Samal ajal viivad mitmed komponentide tootjad kohapeal keerukate paigaldus- ja kasutuselevõtutöödeni ning mõnel neist on suur energiatarve ja 100% sõltuvus gaasiallikatest.Osaline integreerimine ei pruugi olla võimalik
Vältige mürasaastet, mis tähendab vastuvõetamatuid probleeme ülitäpse ja kõrge puhtusega keskkondades, nagu liitiumakud ja pooljuhid.
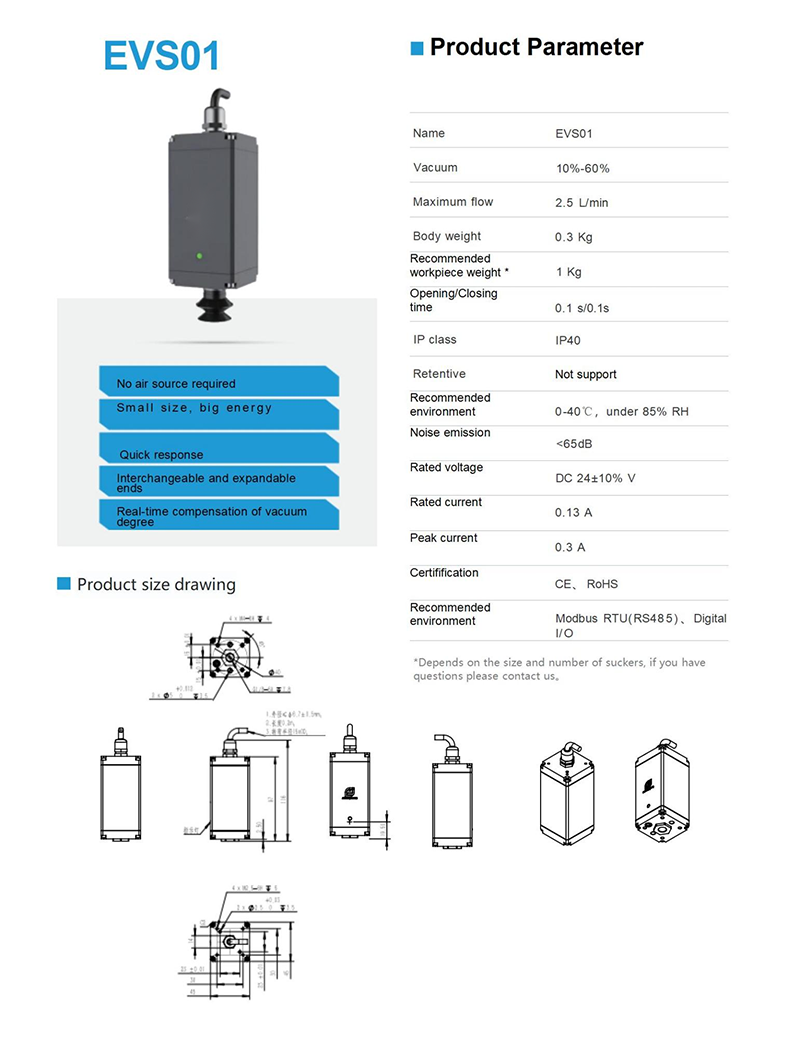
Kokkuvõttes on EVS uue põlvkonna elektriline intelligentne vaakumajam, mis ei vaja täiendavat suruõhuallikat, mis on kahtlemata pilkupüüdev.
Õhku säästva süsteemi suurim eelis on selle paigaldamise lihtsus.Kuna see võib kahtlemata vähendada paljusid abikomponente, sealhulgas õhukompressoreid, õhupaake, õhupuhastusseadmeid ja väljundtorusid jne, muutes juhtmestiku kasutamise lihtsamaks, mugavamaks ja selgemaks klientidele.
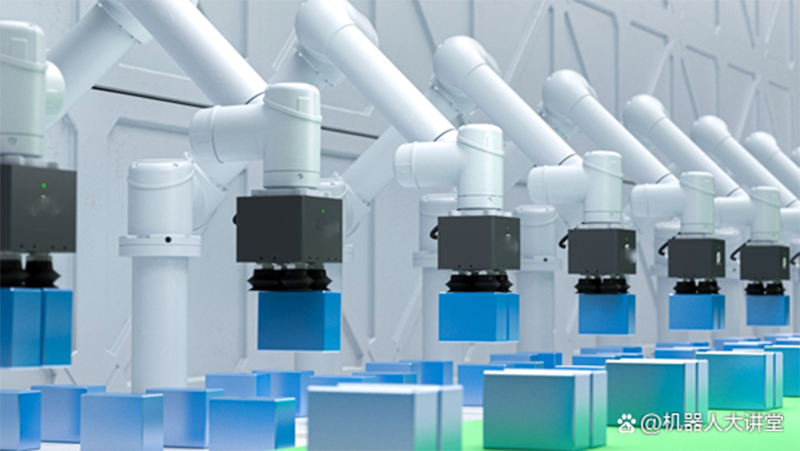
On teatatud, et praegu on paljud stseenid, sealhulgas mobiilsed robotiplatvormid, 3C elektroonikakoost, liitiumakude tootmine, pooljuhtide tootmine, kiirlogistika jne suhteliselt kompaktse ruumi paigutusega.
EVS08 imemiskandiline aku
Rohkem üksikasju ja eeliseid
Robotite loengusaal sai teada, et see toode, mis näeb välja väga väike ja kaalub vaid 2,5 kg, võib ulatuda kõrgele 10 kg-ni.Tänu 24 V madalpinge konstruktsioonile on energiatarve 20% traditsioonilisest pneumaatilisest süsteemist ning adsorptsioonijõudu lõpus saab seadistada ja reguleerida ning adsorptsioonijõud võib ulatuda 102-510 N-ni.
Konstruktsioonikonstruktsiooni osas kasutab EVS kompaktsemat ja kergemat konstruktsiooni, mis muudab EVS-i sama raskuse korral 30% väiksemaks kui traditsiooniline aerodünaamika.
Samal ajal saab selle ühendada otse robotkäe otsas oleva pistikuga, mis vähendab üleliigseid abikomponente, muudab selle kasutamise paindlikumaks, saab kiiresti kasutusele võtta ja suudab hõlpsasti absorbeerida mitut suurt objekti, mis sobib eriti hästi virnastamine, käsitsemine ja muud stseenitoimingud.
Kasutusmugavuse parandamiseks on elektrilisel vaakumajamil ka integreeritud liides, mille abil saab juhtida ja jälgida kogu objektide adsorbeerimise protsessi.
Teatatakse, et see on mõeldud klientide mugavuse huvides, et nad saaksid juhiste abil juhtida vaakumajami vaakumastet ning ühendada adsorptsiooniprotsessi jälgimiseks ja ennustavaks hoolduseks ka IO-lingi kaudu.Oleku jälgimine vähendab vigu ja seisakuid ning tagab süsteemi käideldavuse.
Sellest lähtuvalt kajastuvad EVT eelised ja omadused ka järgmistes punktides:
1. Kompaktne struktuur ja kerge kaal: EVS on 30% väiksem kui traditsiooniline pneumaatiline suurus, kui neelab sama raskuse koormust.Seda saab ühendada mehaanilise õla otsas oleva pistikuga, et saavutada koormuse neeldumine, mis sobib eriti hästi virnastamiseks, käsitsemiseks ja muudeks stseenitoiminguteks;
2. Rikkalik terminali konfiguratsioon: erinevat tüüpi iminappe, turvapatju ja muid komponente saab konfigureerida, et realiseerida erinevate objektide, sealhulgas ruudukujuliste, sfääriliste ja erikujuliste komponentide haaramine;
3. Kahte kanalit saab juhtida iseseisvalt: hõlpsalt juhtida vaakumajami vasakut ja paremat külge ning need kaks külge on üksteisest sõltumatud, parandades veelgi tootmisliini töötõhusust.See realiseerib imemise ja paigutamise samaaegselt, mis hõlbustab oluliselt esemete käsitsemist ja sorteerimist, säästes ruumi ja aega;
4. Reguleeritav imemine: vaakumi astet saab reguleerida vastavalt imetava toote omadustele ja reaalajas vaakumi kompenseerimist;
5. Staatuse tagasiside: sellel on vaakumtagasiside andur, mis suudab tuvastada objektide adsorptsiooni olekut reaalajas ning anda tagasisidet ja häiret;
6. Toite väljalülitamise kaitse: pärast väljalülitamist võib see adsorbeeritud esemete kaitsmiseks realiseerida adsorptsiooni väljalülitamise iselukustuse;
7. Tugev kohanemisvõime: 24V I/O ja MODBUS RTU (RS485) sideprotokolli tugi;
8. Lihtne paigaldada ja siluda: sideprotokoll on lihtne ja loetav, mis vähendab oluliselt silumise raskusi.Lisaks saab kingituseks lisada hostarvuti silumistarkvara, mida saab võrguühenduseta funktsiooni parameetrite seadistamiseks seadistada ja redigeerida.
Järeldus ja tulevik
Automatiseerimise ja intelligentsuse suundumuses on elektrilised vaakumajamid üha enam muutunud võtmekomponendiks robotite ja automaatikasüsteemide normaalse töö tagamiseks, muutes elektriliste täiturmehhanismide kasutamise mugavamaks ja hõlpsamini kasutatavaks ning need võivad vastata mitmekesisematele stsenaariumidele, näiteks mobiilsed komposiitrobotid..
Integreeritud liides ja rikkalik terminali konfiguratsioon ja muud optimeerimised võivad veelgi parandada roboti põhikomponentide töökindlust, vähendada lõppkasutajate tootmisseisakuid ja kaugjuurutamise probleeme ning veelgi vähendada hooldus- ja müügijärgseid kulusid.
Postitusaeg: 19. aprill 2023